Wandreiniging Robot Dashboard
Doel:
Software ontwikkeling van een Gebruikers Interface/dashboard voor de operator van een industrieele semi-autonome reinigingsrobot.
Omschr:
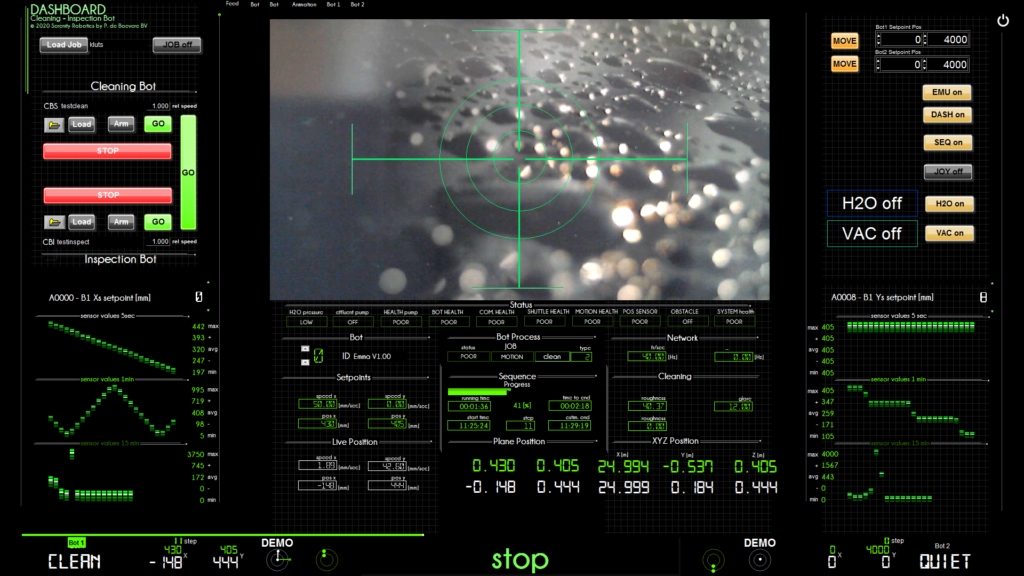
Een geavanceerde industrieele reinigingsrobot gaat in een afgesloten ruimte functioneren waar de operator geen visueel contact mee heeft. Belangrijk is het dan om voldoende visueele informatie te verschaffen aan de operator. Een geavanceerd dashboard met informatie vanuit verschillende perspectieven biedt dan een beter inzicht. Belangrijk voor de operator is het om te kunnen beoordelen of datgene wat de robot geinstrueert is ook daadwerkelijk uitvoert, naast inzicht in de voortgang (in tijd en procentueel) van de maintenance-taak.
Er zijn 3 soorten User Interface gebouwd, een minimale (zonder aansluiting van een scherm), een basis voor gebruik bij 1-scherm en een dual view voor gebruik bij bijvoorbeeld bediening op afstand of vanuit een comfortabele werkpositie (bijv. bedieningsstation/container). De rapportage wordt automatisch opgewekt, naast de tijd-gesynchroniseerde opslag van beelden en meet en besturingsdata. Met dit laatste is een voldoende traceerbaar uitgevoerde reiniging vastgelegd, wat een goed basis is om bij vergelijkbare klussen een nog beter resultaat te behalen. Kortom een 21ste eeuwse oplossing. Dashboard technologie die tot voor kort alleen nog maar beschikbaar was voor de meest exclusieve vaartuigen van deze wereld. Als dit het werk niet aantrekkelijk maakt, weet ik niet wat wel.
Result:
De dashboard integratie is vroeg in 2020 met succes op een simulator getest bij Nobleo (Eindhoven) in haar rol in dit project als motion-control integrator. Helaas is het verzoek tot deelname aan vervolgprojecten om het systeem verder te ontwikkelen, niet gehonoreerd.
Tool:
NI LabVIEW 2016
H.W.:
–
input:
–
output:
–
comm:
met ROS
client:
samenwerkingsproject (via KICMPI)
dacq:
–
periode:
2017-2021